Ciao a tutti, tempo fa ho iniziato anch’io a cimentarmi nella costruzione di un’antenna per la ricezione dei segnali satellitari. A lavoro finito, ho montato il tutto sul camper e collaudato per circa 1 anno, anche in Sardegna, con venti particolarmente forti.
Visto il poco peso dell’antenna (Selfsat HH-90, circa 2,5 Kg.) ho pensato di utilizzare il brandeggio Motore303, dotato di motoriduttori da 12volt, piccoli, ma più che sufficienti allo scopo. La precisione dei movimenti, lascia un pò a desiderare, ma non mi ha mai creato problemi.
Il brandeggio l’ho acquistato sul sito www.sicurex.net ad un prezzo di di circa 70€. 
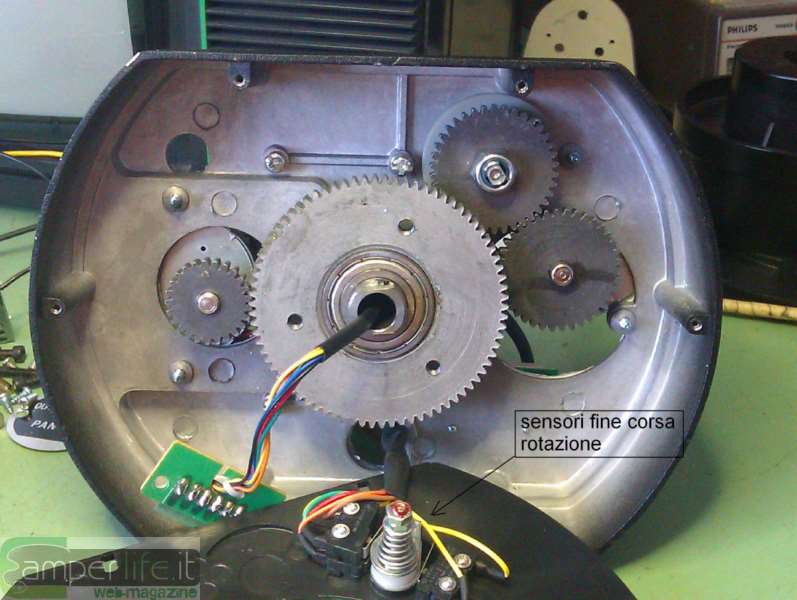
Bisogna innanzitutto modificare la corsa dell’elevazione in modo da avere un’escursione di circa 80°. In pratica, se impostiamo 90° ad antenna chiusa, dovremo avere 10° alla massima elevazione. Occorre inoltre spostare i finecorsa della rotazione nel basamento per evitare infiltrazioni d’acqua e fare in modo che questa sia maggiore di 360 gradi. 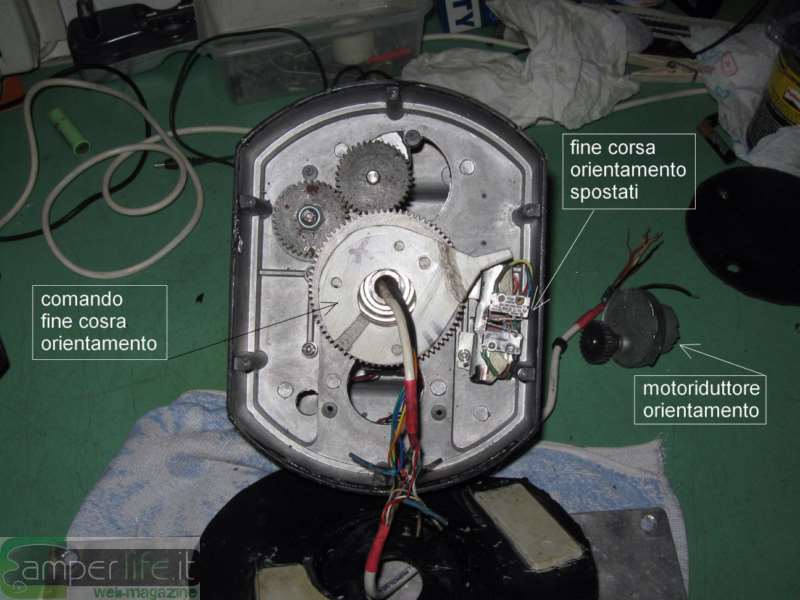

Sul coperchio di chiusura del basamento ho sigillato i fori del finecorsa e del connettore dei fili dei motori che ho rimosso.
 Successivamente, per garantire la tenuta all’acqua, ho incollato con colla Pattex bicomponente un corteco da 70x90x10 nel quale ruoterà la parte del basamento da fissare al tetto del camper. Ho pure incollato altri 2 cortechi da 35x45x7 per la tenuta del movimento elevazione sul coperchio del brandeggio, dopo avere centrato e allargato i due camper arduino-uno parabola fai da te fori adattandoli al diametro esterno dei cortechi stessi.
Successivamente, per garantire la tenuta all’acqua, ho incollato con colla Pattex bicomponente un corteco da 70x90x10 nel quale ruoterà la parte del basamento da fissare al tetto del camper. Ho pure incollato altri 2 cortechi da 35x45x7 per la tenuta del movimento elevazione sul coperchio del brandeggio, dopo avere centrato e allargato i due camper arduino-uno parabola fai da te fori adattandoli al diametro esterno dei cortechi stessi.
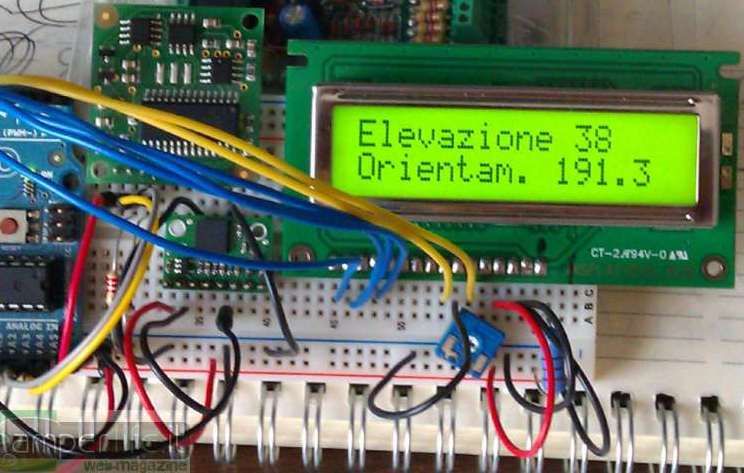
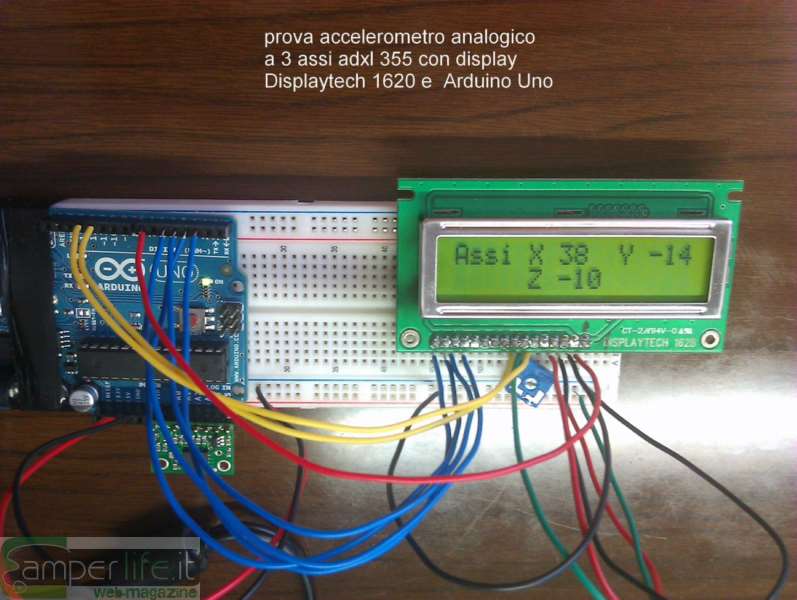
Per la ricerca satelliti e il pilotaggio motori, ho utilizzato Arduino Uno, una bussola elettronica CMPS-03 in modalità PWM per l’orientamento, un accelerometro ADXL355 analogico a 3 assi per l’elevazione, un SatFinder per il rilevamento segnale e un display Displaytech 162B a 2 linee e 16 caratteri per la lettura di tutti i dati.
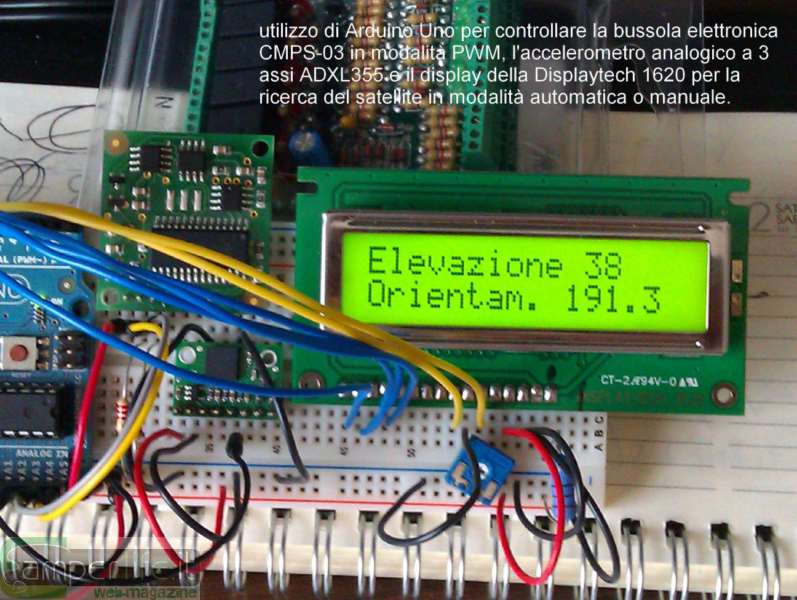
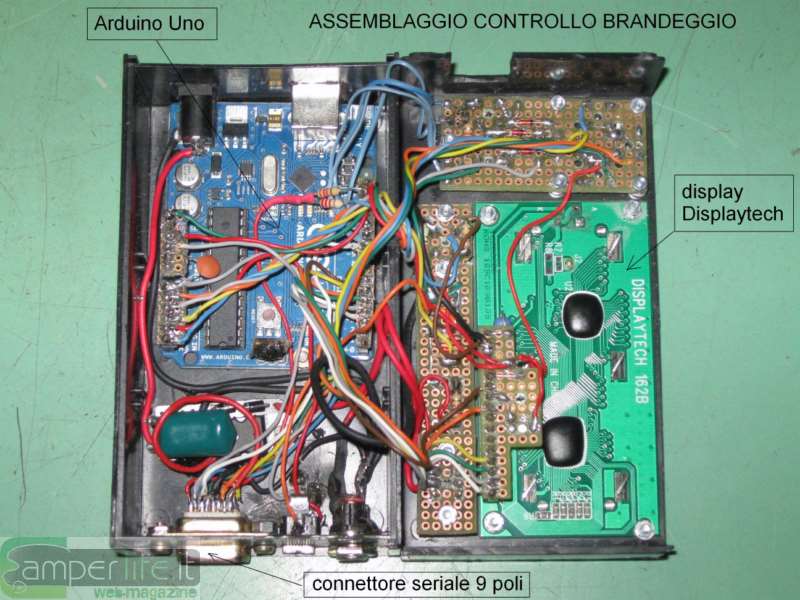
Il controllo (prototipo), l’ho assemblato in un contenitore di circa 10x7x4. Si vedono, oltre al display, i pulsanti di accensione e relativo led, reset, store (per memorizzare i dati di direzione/elevazione), manuale/automatico con relativo led e altri 4 pulsanti per i comandi manuali. Per collegare il tutto con l’antenna ho fatto uso di un cavo (3 metri) a 10 fili per antifurto, saldati su connettori a vaschetta da 9 poli (quelli per le porte seriali PC).

Sul brandeggio rimontato, si vedono l’angolare in alluminio da 4 mm. fissato alla staffa modificata per poter abbassare completamente l’antenna, il contenitore della bussola e quello dell’ accelerometro. Dopo aver tagliato il basamento fisso all’altezza dell’anello superiore per poterlo abbassare di circa 8 cm. il tutto è stato fissato su una piastra di alluminio di circa cm. 30x45.


Il sito della Ditta SELFSAT - www.selfsatitalia.it - costruttrice dell’antenna e il sito Amazon ( www.amazon.it ) per il possibile acquisto.

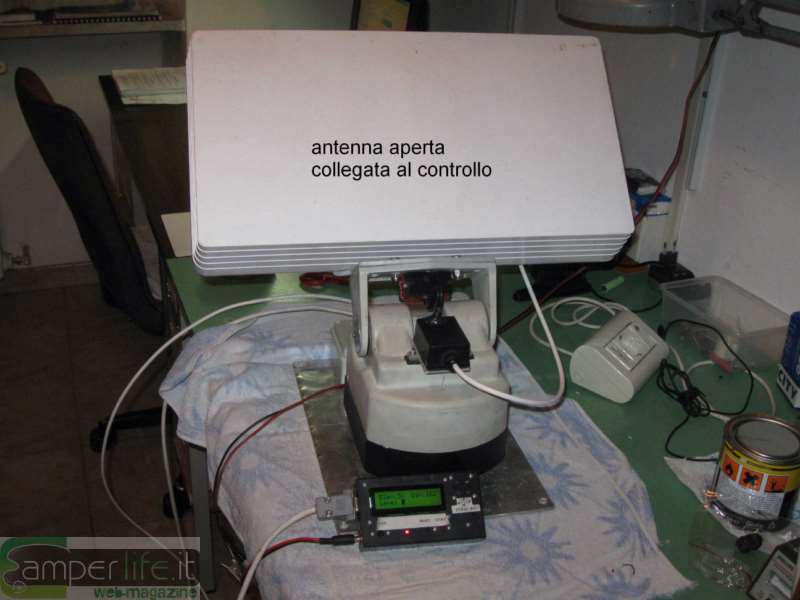
Qui si vede l’antenna montata e chiusa (circa 20cm.) e il contenitore a tenuta stagna per l’ interfaccia pilotaggio motori.
L’interfaccia, da me progettata e molto semplice (vedi lo schema qui sotto), a questa però ho aggiunto un integrato 7805 per avere i 5 volt per la bussola e l’accelerometro.
L’assemblaggio è stato fatto su basetta millefori come per il controllo.


Sul sito www.emartee.com potrete trovare un’ ottima interfaccia per pilotare 2 motori in cc oppure 1 motore passo/passo.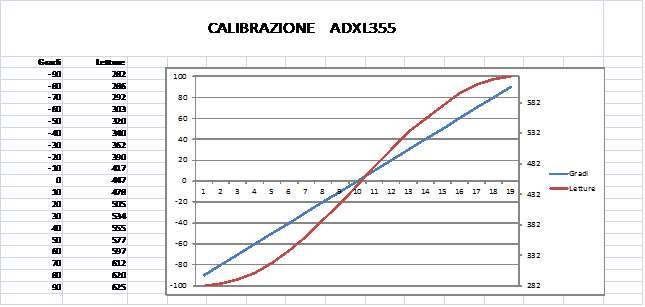 Da questa basetta è pure possibile prelevare i 5V. per l’alimentazione della bussola e dell’accelerometro.
Da questa basetta è pure possibile prelevare i 5V. per l’alimentazione della bussola e dell’accelerometro.
L’ accelerometro ADXL355 che ho usato io richiede un’ulteriore riduttore di tensione in quanto funziona a 3,3V., devo però dire che in commercio se ne trovano anche a 5 volt con riduttore incorporato
Per avere il massimo della linearità nella lettura dell’inclinazione, l’accelerometro va montato inclinato di 45° in modo che sia in piano quando l’elevazione dell’antenna è a 45° (in figura si vede la calibrazione fatta con il mio).
Interfaccia controllo motori
Programma da caricare su Arduino Uno per il controllo. Dico subito che non sono un esperto di programmazione e quindi sono ben accetti tutti i consigli per ottimizzare il tutto. Purtroppo con la precisione di questa meccanica non è possibile fare l’aggancio perfetto in automatico, ho quindi fatto in modo di tenere agganciata l’elevazione (38°) e di fermare il tutto con il rilevamento del SatFinder oppure al raggiungimento di 162°.

Nel video qui sotto il primo collaudo del sistema appena descritto
windom46









